伺服是一個閉環系統,它是由電流環、速度環、位置環組成,位置環的輸出作為速度環的給定,速度環的輸出又是電流環的給定。
它本質上是一個跟隨系統:
按接受的指令的速度運行 ;
按接受的指令的位置定位;
按接受的指令的扭矩出力。

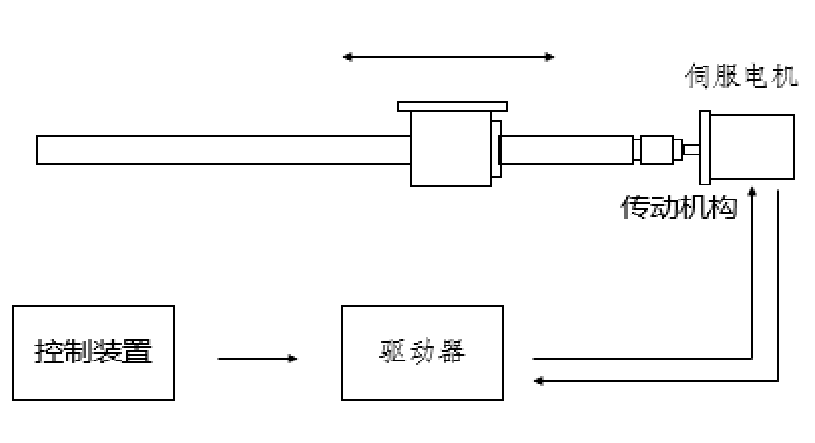
半閉環控制(SEMI-CLOSE LOOP)
將位置或速度傳感器,安裝于電機軸上以取得位置反饋信號及速度反饋信號。
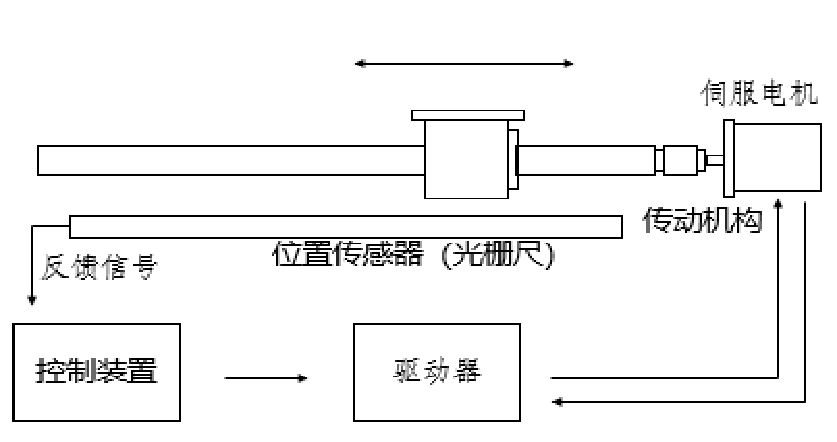
全閉環控制(FULL-CLOSE LOOP)
利用光柵尺等位置傳感器,直接將物體的位移量同步返回到控制系統。
北京普天精銳自控技術有限責任公司 北京市昌平區育知東路首開智慧社1號樓3單元310室 010-82397875 京ICP備13002032號-1
